USING COUCHDB
2012-02-27

Introduction
Before using this information, you need to know how the JSON format works. JSON is kind of like XML, it is a way of
representing data. I won't go into more details in here.
Concepts
If you are switching from a SQL database like MySQL to couchdb, then chances are you will be wondering where are the tables and how do I query them? Well there is no table. To make things simple, try to think of it this way:
- CouchDB is like a database that contains only one table and one column. Each row is filled with a JSON document. You could easily do that with MySQL, except that the server doesn't understand JSON, so it can't do any special processing based on what your JSON document contains.
- Everything is done through a web interface using a REST API. This doesn't mean that you query the DB directly from your website (you still make the queries from the server side). And for that matter, it doesn't mean that CouchDB is only made for websites.
- If you are searching for "stored procedures", you wanna use "views" with couchDB.
So consider this: If you are building a simple blog where each posts contains a timestamp, a title and a content, then you will probably create a table like this in MySQL:
| ID | TimeStamp | Title | Content |
|---|
| 1 | 330133439 | A Post | oh yeah |
| 2 | 330133439 | Another post | blah blah blah |
| ... |
What happens if you wanna add a "tag" column at one point? You'd have to modify your schema. So instead, for flexibility, you will decide to use one column only and store each post with a format you like, maybe you'll choose XML:
| Data |
|---|
| <post> <id>1<\id> <title>A post</title> <timestamp>330133439</timestamp> <content>oh yeah</content> </post> |
| <post> <id>2<\id> <title>Another post</title> <timestamp>330133439</timestamp> <content>blah blah blah</content> </post> |
| ... |
This is exactly what couchDB is used for. Except that instead of a row, it calls it a document. Instead of using XML, it uses the JSON format. You might be wondering what's the point of using couchdb over mysql if both can do the same thing then. Couch DB adds more functionalities, like adding attachments to a document, create views with javascript and so much more. You will find a lot of blogs with people debating SQL vs NoSQL, so I won't cover this here. I just wanted to explain what CouchDB is.
Cheatsheet
- Check if DB exists: curl -X GET http://127.0.0.1:5984/database1/
where 'database1' is the name of your database
Will return an error if DB does not exist
- Create a database: curl -X PUT http://127.0.0.1:5984/database1/
where 'database1' is the name of your database
- Create a document: curl -X PUT http://127.0.0.1:5984/database1/document1 -H "Content-Type: application/json" -d {"field1":"value1","field2":"value2"}
where 'database1' is the name of your database
where 'document1' is the ID of the document to create
- Retrieve a document: curl -X GET http://127.0.0.1:5984/database1/document1
where 'database1' is the name of your database
where 'document1' is the ID of the document to retrieve
- Create a view: curl -X PUT http://127.0.0.1:5984/database1/_design/designdocument1 -H "Content-Type: application/json" -d {JSON_REPRESENTATION_OF_VIEW}/
where 'designdocument1' is the name of your designdocument
Note that a design document can contain more than one view. A view contains a map function and a reduce function.
The following is an example of what could be included as the "JSON_REPRESENTATION_OF_VIEW"
{
"language": "javascript",
"views": {
"view1": {
"map": "function(doc){emit(doc._id,doc);}"
},
"view2": {
"map": "function(doc){emit(doc._id,doc);}",
"reduce": "function (key, values){return null;}"
}
}
}
- Query a view: http://127.0.0.1:5984/database1/_design/designdocument1/_view/view2?reduce=true&group=true&skip=2&limit=5
where 'database1' is the name of your database
This will return the results of the view "view1" in "designdocument1". We have also provided parameters in the
URL that says: we want the reduce function to be executed, we want results grouped, we want to skip the 2 first
documents returned by the view, we want a maximum of 5 documents in total.
using the results in php
If we query curl -X GET http://127.0.0.1:5984/database1/document1
and we get the result
{
"_id": "document1",
"_rev": "1-a227e6b8d34d14fbc59c4dde72e53848",
"field1": "value1",
"field2": {"sub1":"val1","sub2":"val2"},
"field3": ["val1","val2","val3"]
}
Then we can take that result and decode it using json_decode
$obj = json_decode($jsonString);
We get:
- $obj->field1="value1"
- $obj->field2->sub2"val2" ($obj->field2 is an object)
- $obj->field3[1]="val2" ($obj->field3 is an array)
Text Search
Consider this SQL query: SELECT * FROM posts WHERE content LIKE 'test'. With
CouchDB, it gets a little more complicated. First, you need to create a view that emits a map of ALL
the words in your documents.
function(doc) {
var tokens;
if (doc.content) {
var st = doc.content.replace(/<(?:.|\n)*?>/gm, '');
tokens = st.split(/[^A-Z0-9\-_]+/i);
var uniqueTokens = {};
for (var i=0;i<tokens.length;i++)
{
var key = (tokens[i]);
if (key!="") uniqueTokens[key] = key;
}
for (var token in uniqueTokens){
emit(token,doc.title);
}
}
}
So if you have the following documents in your database:
{"title":"doc1","content":"hello this is a test"}
{"title":"doc2","content":"another document"}
Your view would output the following:
"hello",doc1
"this",doc1
"is",doc1
"a",doc1
"test",doc1
"another",doc2
"document",doc2
So if you want to retrieve only the documents that contains the word "test", then you could invoke the following:
http://127.0.0.1:5984/database1/_design/designdocument1/_view/view1?keys=["test"]
INSTALLING COUCHDB ON SLACKWARE
2012-02-26
Installation for Slackware 13.0 on a x86_64 platform
Here is a link that helped me with this: http://wiki.apache.org/couchdb/Installing_on_Slackware
I never use packages. I always compile and install from source.
First you need to compile&install the dependencies. Those can be found on the page I have referenced. For couchdb 1.1.1, I had to install: icu4c 4.2.1, js 1.8.0_rc1 and Erlang R13B03. Next, you can proceed with compiling and installing couchdb. I had to execute ldconfig after installing couchdb.
Configuring
invoke "couchdb -c" to see what config file is used
# couchdb -c
/usr/local/etc/couchdb/default.ini
/usr/local/etc/couchdb/local.ini
Now we know that the configuration files are in /usr/local/etc/couchdb. Open the local.ini file because any changes made in default.ini files will be overwritten on a server upgrade. In the configuration file, locate "bind_address" and change it to the address you need your server to bind to. Use 0.0.0.0 to bind to any address.
Now you are ready to launch couchdb with "couchdb -b". I have also added "couchdb -b" in my rc.local boot script so that couchdb is loaded on a server reboot.
NGW100 MY OS AND EDXS/LSE
2012-02-25
Peripheral communication - EDXS/LSE
External Data eXchange Services
Peripherals are abstracted at a minimum by the OS. The OS abstracts the devices while applications
must implement their drivers.A peripheral can send data (from the device to external environment) or receive data
(from enviroment into the device). The OS is responsible for receiving data from the peripherals upon
interrupt and to try send data until the device is ready. The module responsible for allowing
the OS to exchange data between applications and peripherals is called the External Data eXchange Services (EDXS).
The EDXS provides the following services:
- Sending:
An application may request the OS the to send the contents of a buffer out of a peripheral (serial port, ethernet, etc.)
the OS will provide a function that waits until the device is ready and send the data. Therefore, sending
functions are blocking.
- Receiving:
The OS gets notified by peripherals that data is available trough the use of interrupts. The OS will extract
data from the peripheral and store it in a temporary buffer. The OS will provide a function that
returns the available data if available or an error if no data is available. The OS will not
notify applications that this data has been received, it is the responsibility of the applications
to verify if data is ready. Receiving functions are synchronous and non-blocking.
The following is a list of device services provided by the EDXS:
- SFlashSend
- SFlashRecv
- SDSend
- SDRecv
- EthRecv
- EthSend
- SerialRecv
- SerialSend
Logical Services Extension
The EDXS allows an application to exchange raw data with peripherals. This is often not convenient though.
For this reason, an extension to the EDXS is provided by the OS. This is called the Logical Services
Extension (LSE). The LSE is always used with the EDXS (EDXS/LSE).
Since it is impractical, with the EDXS, to access the dataflash or the ethernet controllers, the LSE
will provide functions that allow applications to access a more generalized representation of the device.
The LSE provides the following abstractions:
- FAT32 File system.
To access the dataflash and MMC
- FSOpenFile
- FSCloseFile
- FSReadFile
- FSWriteFile
- FSDeleteFile
- FSCreateFile
- IP interface
takes care of ARP,DHCP,DNS
udp sockets
tcp sockets (takes care of SYN/ACK and all ACKS)
- IPInit: set ip/gateway/subnet
- TCPConnect
- TCPAccept
- TCPRecv
- TCPSend
- TCPClose
- UDPRecv
- UDPSend
User interface
The EDXS/LSE provide functions that must execute in supervisor mode but accessible from application mode. For this,
the "scall" mechanism will be used. The functions provided by EDXS/LSE will all be accessible trough supervisor calls.
A user friendly API that wraps those call will be provided.

NGW100 - MY OS
2012-02-25
Preface
This section describes the implementation of my OS at a high level. Not all of it is working right now
but this is the basic idea.
Source code
You can download the current code but it is far from being complete.
Download
The big picture
The OS is not meant to be an operating system like linux or windows where user application can run.
The purpose is to provide a basic platform to implement different "firmwares". A firmware
is a set of application in this context. Depending on what you want your NGW100 to be, you would
run a different firmware (set of applications) that would drive the board through services
provided by the OS.
The following picture describe what components will be handled by the OS.
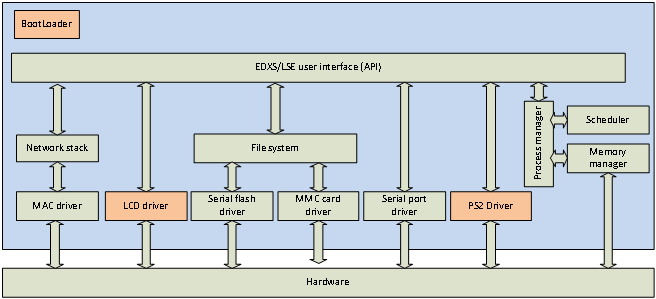
The orange boxes represent modules that will be implemented in the future. The "EDX/LSE" is
an OS specific component, don't try to find info about it in the datasheet. This is described
here
Note how the USB controller, AC97 device, timers and several other devices are not represented in the graphics.
This is because the OS won't take care of these devices. Drivers for these devices will be implemented as
applications. So if I want to make my NGW100 device act as a USB storage device, I would have to write an
application that implements the USB Mass Storage device protocol and use the file system module of
the OS through the API. So building a router with my NGW100 would be a matter of developping applications
that would run cooperatively like a serial shell app, packet-routing app, web-server app, usb mass storage app,
etc.
Virtual file system
The OS will locate files using the following path structure: /0/dir/file. "/0" is the storage device number and the
"/dir/file" is the path of a file on that storage device. The following storage devices will be recognized:
| Number | Device |
|---|
| 0 | Onboard Dataflash |
| 1 | SD card |
Booting
Booting is currently done with u-boot as I don't have a JTAG tool yet. Eventually, I would like to have
it boot on its own. Since u-boot initializes stuff for me, I will be own my own when I take the step.
With u-boot, I am downloading the firmware trough a tftp server and I save the image in the parrallel flash
at address 0x00100000. I then execute the code from address 0x80100000 (remember, 80000000 is mapped to 0x00000000).
Executing from that address makes the code run in priviledged mode.
After the kernel will start running and all initialization is done, it will look in the dataflash for the boot
script. This script contains a list of applications (located on dataflash or SD card) that should run at startup
and a some other settings.
Boot script
This file will be located at "/0/boot.script".
todo: not designed yet
Initialization
The following is a list of things I am doing before attempting entering the idle loop in my OS
- Reset some CPU settings to default. I looked at what u-boot was doing on reset and I do the same.
- Configure the PM to enable PLL and run at 150MHZ.
- Not sure what the SMC is, but I think I have to set it up in order to use ethernet devices
- Initialize the EVBA and clear interrupt mask flag
- Initialize SDRAM
- Initialize the MMU
- Initialize serial port
Memory Management
Overview
Physical memory usage
| Physical memory | Description |
|---|
| 0x00000000 - 0x000FFFFF | Reserved (u-boot is in there) in parallel flash |
| 0x00100000 - 0x0010FFFF | Kernel code in parallel flash |
| 0x00110000 - 0x007EFFFF | Parallel flash. reserved by kernel. Unused yet |
| 0x007F0000 - 0x007FFFFF | Reserved by u-boot (parallel flash) |
| 0x00800000 - 0x0FFFFFFF | INVALID |
| 0x10000000 - 0x1000FFFF | Page table(SDRAM) |
| 0x10010000 - 0x11E73FFF | process memory (SDRAM) |
| 0x11E74000 - 0x11F09FFF | graphic memory |
| 0x11F0A000 - 0x11FAFFFF | reserved |
| 0x11FF0000 - 0x11FFFFFF | kernel buffers (SDRAM) |
| 0x12000000 - 0x23FFFFFF | INVALID |
| 0x24000000 - 0x24000FFF | Kernel Stack (SRAM) |
| 0x24001000 - 0x24007FFF | Kernel heap (SRAM) |
| 0x24008000 - 0xFEFFFFFF | INVALID |
| 0xFF000000 - 0xFFFFFFFF | Memory-mapped IO |
Memory mapping viewed by kernel
| Address range | Description | Relation to physical memory |
|---|
| 0x00000000 - 0x03FFFFFF | INVALID | Page translated but not handled by OS |
| 0x04000000 - 0x04000FFF | Kernel Stack | Page translated to SRAM |
| 0x04001000 - 0x0400107F | Process Table | Page translated to SRAM |
| 0x04001080 - 0x0400108F | USART0 TX buffer | Page translated to SRAM |
| 0x04001090 - 0x0400109F | USART0 RX buffer | Page translated to SRAM |
| 0x040010A0 - 0x040010AF | USART1 TX buffer | Page translated to SRAM |
| 0x040010B0 - 0x040010BF | USART1 RX buffer | Page translated to SRAM |
| 0x040010C0 - 0x040010CF | USART2 TX buffer | Page translated to SRAM |
| 0x040010D0 - 0x040010DF | USART2 RX buffer | Page translated to SRAM |
| 0x040010E0 - 0x040010EF | USART3 TX buffer | Page translated to SRAM |
| 0x040010F0 - 0x040010FF | USART3 RX buffer | Page translated to SRAM |
| 0x04001100 - 0x0400117F | Reserved fo MMC driver | Page translated to SRAM |
| 0x04001180 - 0x04007FFF | Kernel heap | Page translated to SRAM |
| 0x04008000 - 0x7FFFFFFF | INVALID | Page translated but not handled by OS |
| 0x80000000 - 0x800FFFFF | Reserved (u-boot is in there) in parallel flash | Cached, Segment translated to flash |
| 0x80100000 - 0x8010FFFF | Kernel code in parallel flash | Cached, Segment translated to flash |
| 0x80110000 - 0x807EFFFF | Parallel flash. reserved by kernel. Unused yet | Cached, Segment translated to flash |
| 0x807F0000 - 0x807FFFFF | Reserved by u-boot (parallel flash) | Cached, Segment translated to flash |
| 0x80800000 - 0x8FFFFFFF | INVALID | N/A |
| 0x90000000 - 0x9000FFFF | Page table | Cached, Segment translated to SDRAM |
| 0x90010000 - 0x91E73FFF | process memory | Cached, Segment translated to SDRAM |
| 0x91E74000 - 0x91F09FFF | graphic memory | Cached, Segment translated to SDRAM |
| 0x91F0A000 - 0x91FAFFFF | reserved | Cached, Segment translated to SDRAM |
| 0x91FA0000 - 0x91FAFFFF | dataflash temp buffer | Cached, Segment translated to SDRAM |
| 0x91FB0000 - 0x91FBFFFF | mmc temp buffer | Cached, Segment translated to SDRAM |
| 0x91FC0000 - 0x91FC017F | MACB0 rx descriptor table | Cached, Segment translated to SDRAM |
| 0x91FC0180 - 0x91FC01DF | MACB0 tx descriptor table | Cached, Segment translated to SDRAM |
| 0x91FC01E0 - 0x91FC19DF | MACB0 rx buffer | Cached, Segment translated to SDRAM |
| 0x91FC19E0 - 0x91FC31DF | MACB0 tx buffer | Cached, Segment translated to SDRAM |
| 0x91FC31E0 - 0x91FC31E3 | MACB0 current RX entry | Cached, Segment translated to SDRAM |
| 0x91FC31E4 - 0x91FC31E7 | MACB0 current TX entry | Cached, Segment translated to SDRAM |
| 0x91FC31E8 - 0x91FC31FF | MACB0 net config | Cached, Segment translated to SDRAM |
| 0x91FC3200 - 0x91FC337F | MACB1 rx descriptor table | Cached, Segment translated to SDRAM |
| 0x91FC3380 - 0x91FC33DF | MACB1 tx descriptor table | Cached, Segment translated to SDRAM |
| 0x91FC33E0 - 0x91FC4BDF | MACB1 rx buffer | Cached, Segment translated to SDRAM |
| 0x91FC4BE0 - 0x91FC63DF | MACB1 tx buffer | Cached, Segment translated to SDRAM |
| 0x91FC63E0 - 0x91FC63E3 | MACB1 current RX entry | Cached, Segment translated to SDRAM |
| 0x91FC63E4 - 0x91FC63E7 | MACB1 current TX entry | Cached, Segment translated to SDRAM |
| 0x91FC63E8 - 0x91FC63FF | MACB1 net config | Cached, Segment translated to SDRAM |
| 0x91FC6400 - 0x91FC67FF | ARP cache | Cached, Segment translated to SDRAM |
| 0x91FC6800 - 0x91FFFFFF | reserved | Cached, Segment translated to SDRAM |
| 0x92000000 - 0x9FFFFFFF | INVALID | N/A |
| 0xA0000000 - 0xBFFFFFFF | Same as 0x80000000-0x9FFFFFFF | Same as 0x80000000-0x9FFFFFFF but uncached |
| 0xC0000000 - 0xDFFFFFFF | INVALID | Page translated but not handled by OS |
Memory mapping viewed by application process
| Address range | Description |
|---|
| 0x00000000 - 0x000000FF | Application stack |
| 0x00000100 - 0x000001FF | supervisor stack |
| 0x00000200 - 0x000002FF | Reserved |
| 0x00000300 - 0x00000343 | Task context |
| 0x00000344 - 0x000003FF | Reserved |
| 0x00000400 - 0x01FFFFFF | User space. Size may differ, depending on allocated space |
| 0x02000000 - 0x7FFFFFFF | INVALID |
| 0x80000000 - 0xFFFFFFFF | Access denied |
Memory mapping viewed by system threads
| Address range | Description |
|---|
| 0x00000000 - 0x000000FF | Thread stack |
| 0x00000100 - 0x00000143 | Task context |
| 0x00000144 - 0x01FFFFFF | Reserved |
| 0x02000000 - 0x7FFFFFFF | INVALID |
| 0x80000000 - 0xFFFFFFFF | kernel space |
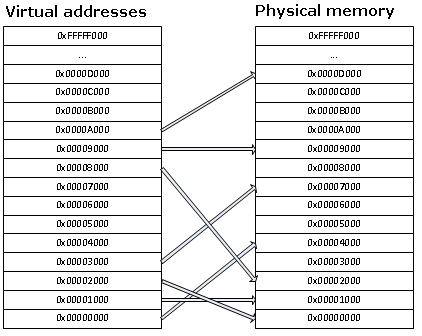
Paging
The OS will use paging and segmentation at the same time. This means that the first 2gigs of addressing space
will be separated in 4k chunks and remapped on the physical space in another way. More information on this can
be found in the AVR32 architecture section of this site. Paging allows us to remap the memory in a non-contiguous
way.
Application processes will use the SDRAM memory. Only the SRAM and SDRAM memories will be paged.
The page table will be stored in the sdram and will be 64K in size (8192 pages). 8192 pages
will allow us to maintain 4k pages for the reset of the SDRAM and
the whole 32K sram. The sram pages will be used as the heap for the kernel and will be protected.
The SDRAM pages will be set as private and will be associated with the owning process ASID.
In the page table, a page entry will take 64bit in size. The first 32bit is going to be structured like
TLBEHI. This 32bit field will allow us to find an entry on the table based on the requested page number
and ASID. The last 32bit will be a copy of what should be copied in TLBELO when finding a match for TLBHI.
The first 8 entries in the page table will be reserved for the SRAM. The rest of the entries will reflect
the physical SDRAM space in the same order. The first 32bits of each entry do not have to be linear though.
Example Page table:
| PageTable 1st 32bits | Page table last 32bits |
|---|
| VPN=0x24000 | PFN=SRAMBlock0 |
| VPN=0x24001 | PFN=SRAMBlock1 |
| VPN=0x24002 | PFN=SRAMBlock2 |
| VPN=0x24003 | PFN=SRAMBlock3 |
| VPN=0x24004 | PFN=SRAMBlock4 |
| VPN=0x24005 | PFN=SRAMBlock5 |
| VPN=0x24006 | PFN=SRAMBlock6 |
| VPN=0x24007 | PFN=SRAMBlock7 |
| VPN=0, ASID=1 | PFN=SDRAMBlock0 |
| VPN=0, ASID=2 | PFN=SDRAMBlock1 |
| VPN=89, ASID=1 | PFN=SDRAMBlock2 |
| VPN=9, ASID=1 | PFN=SDRAMBlock3 |
| ... | ... |
The page table will also be used by the kernel to track available memory. A page with the "v" flag cleared
means that this page is not reserved by any application so that 4k of memory is free. When allocating
memory to a process, the "v" flag of the reserved pages will be set.
Scheduler
The scheduler will use a timer to switch task. A task switch will occur about 20 times per seconds.
In order to switch tasks, the current context must be saved in the application space. The scheduler will
perform the following tasks:
- Go through the list of process and find the next one to be switched to in a round-robin fashion.
- Using the stmts instruction, save all registers from ro to r14 to the application space buffer. stmts
will save the registers from the application context. We will be executing from INT3 so registers
r8 to r14 will be shadowed, meaning that even if we change them, stmts will pickup the right values
that were assigned before entering INT3.
- Save the RSR_INT3 register to the application space. RSR_INT3 contains the system flags before
entering INT3. If the interrupt occured between a "cp.w" and a "breq", teh flags need to be preserved.
- Save the RAR_INT3. This register contains the return address that rete is going to use to resume
execution of the interrupted code.
- Change the TLBEHI's ASID. Since we are switching context, the pages won't be mapped the same way. From now
on, accessing the data in the application space will give us the data from the new application space.
- using ldmts, restore R0-R14.
- restore RSR_INT3
- restore RAR_INT3, so we can use rete to resume the task.
Dataflash
The dataflash is accessed with the SPI bus. Since the dataflash is not a protable device and only
the MCU can access it, it is a good opportunity to design my own file system. That memory will contain
the boot script.
Dataflash file system
todo: not designed yet